





























Nahlásit
![[Laser cut and engrave,Other] Electronic Hardware Compatible Project Rover Car](https://image-res.xtool.com/resource/xtool/community/attachment/xtool-community/e5bb9122-ed63-4aa3-8cab-b4553f055402?x-oss-process=image/resize,w_1200,h_900,limit_0/interlace,1/format,webp/auto-orient,1)
![[Laser cut and engrave,Other] Electronic Hardware Compatible Project Rover Car](data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAAAoAAAAKCAYAAACNMs+9AAAAAXNSR0IArs4c6QAAABdJREFUKFNjZCASMBKpjmFUId6QIjp4AAppAAuXjCs4AAAAAElFTkSuQmCC)
![[Laser cut and engrave,Other] Electronic Hardware Compatible Project Rover Car](https://image-res.xtool.com/resource/xtool/community/attachment/xtool-community/e5bb9122-ed63-4aa3-8cab-b4553f055402?x-oss-process=image/resize,w_200,h_150,limit_0/interlace,1/format,webp/auto-orient,1)
![[Laser cut and engrave,Other] Electronic Hardware Compatible Project Rover Car](https://image-res.xtool.com/resource/xtool/community/attachment/xtool-community/a4974318-da2c-4cfc-9eef-0a7154a85706/cover.png)
![[Laser cut and engrave,Other] Electronic Hardware Compatible Project Rover Car](https://image-res.xtool.com/resource/xtool/community/attachment/xtool-community/66221962-f8f1-41f4-8b9f-290951929200/Ekran görüntüsü 2024-09-16 024445.png?x-oss-process=image/resize,w_200,h_150,limit_0/interlace,1/format,webp/auto-orient,1)
![[Laser cut and engrave,Other] Electronic Hardware Compatible Project Rover Car](https://image-res.xtool.com/resource/xtool/community/attachment/xtool-community/934d5a70-2dde-4ed7-9afc-f3c89a842e44/Ekran görüntüsü 2024-09-16 024514.png?x-oss-process=image/resize,w_200,h_150,limit_0/interlace,1/format,webp/auto-orient,1)
![[Laser cut and engrave,Other] Electronic Hardware Compatible Project Rover Car](https://image-res.xtool.com/resource/xtool/community/attachment/xtool-community/ca8562ad-cdee-465b-98b5-af3b8c553af7/Ekran görüntüsü 2024-09-16 024525.png?x-oss-process=image/resize,w_200,h_150,limit_0/interlace,1/format,webp/auto-orient,1)
![[Laser cut and engrave,Other] Electronic Hardware Compatible Project Rover Car](https://image-res.xtool.com/resource/xtool/community/attachment/xtool-community/c18c5863-e58d-4f12-a024-6243c6c12c8a/Ekran görüntüsü 2024-09-16 024604.png?x-oss-process=image/resize,w_200,h_150,limit_0/interlace,1/format,webp/auto-orient,1)
![[Laser cut and engrave,Other] Electronic Hardware Compatible Project Rover Car](https://image-res.xtool.com/resource/xtool/community/attachment/xtool-community/ddefa488-523d-4908-9a2d-a601c7d38970/Ekran görüntüsü 2024-09-19 004247.png?x-oss-process=image/resize,w_200,h_150,limit_0/interlace,1/format,webp/auto-orient,1)
![[Laser cut and engrave,Other] Electronic Hardware Compatible Project Rover Car](https://image-res.xtool.com/resource/xtool/community/attachment/xtool-community/de38e7ee-dd02-4ede-9640-00040baa89d9/WhatsApp Görsel 2024-09-19 saat 03.29.38_cf277eda.jpg?x-oss-process=image/resize,w_200,h_150,limit_0/interlace,1/format,webp/auto-orient,1)
![[Laser cut and engrave,Other] Electronic Hardware Compatible Project Rover Car](https://image-res.xtool.com/resource/xtool/community/attachment/xtool-community/58239e44-2ea2-4f88-a1ef-0afee57b332b/WhatsApp Görsel 2024-09-19 saat 03.29.38_cf708a07.jpg?x-oss-process=image/resize,w_200,h_150,limit_0/interlace,1/format,webp/auto-orient,1)
![[Laser cut and engrave,Other] Electronic Hardware Compatible Project Rover Car](https://image-res.xtool.com/resource/xtool/community/attachment/xtool-community/f7bfeb64-4c0e-4566-a122-c714763d19d1/WhatsApp Görsel 2024-09-19 saat 03.29.38_ecb953c8.jpg?x-oss-process=image/resize,w_200,h_150,limit_0/interlace,1/format,webp/auto-orient,1)
![[Laser cut and engrave,Other] Electronic Hardware Compatible Project Rover Car](https://image-res.xtool.com/resource/xtool/community/attachment/xtool-community/c5634a09-a859-4141-a943-d4fcd5a88bc4/WhatsApp Görsel 2024-09-19 saat 03.29.39_1d41a971.jpg?x-oss-process=image/resize,w_200,h_150,limit_0/interlace,1/format,webp/auto-orient,1)
Elektronický hardware kompatibilní Project Rover Car
 Návod
Návod
RoverMk5DxfFiles
.zip
Zobrazit zbývající (1 položek)
Aplikační scénář
Laserová úprava、Jiný (30min)
Stroj a modul
xTool Laserbox
40WxTool P2
55WxTool M1 Ultra
10W, 20WxTool M1
5W, 10WPoužitý materiál

MDF deska 1/8" (3mm)
51
2840
Informace
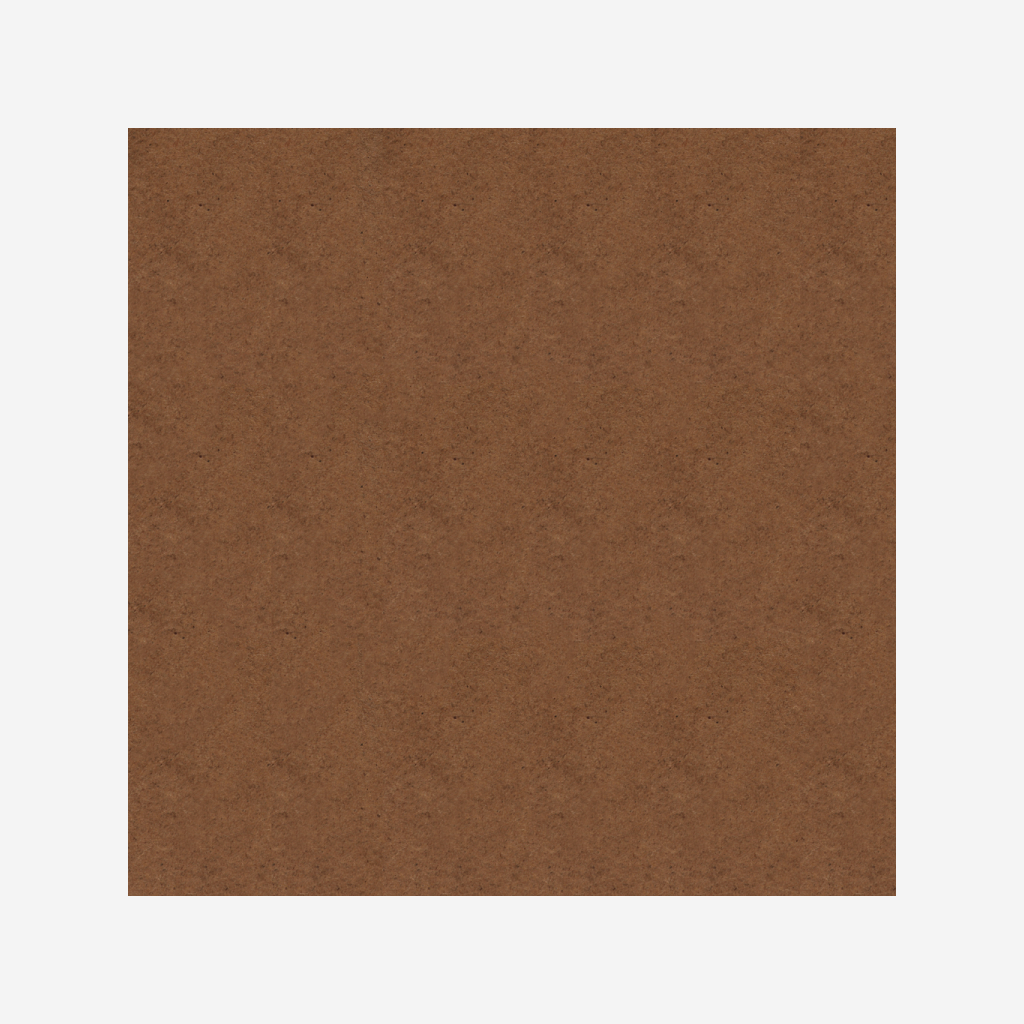
Pro školní robotické týmy vyvíjející projekty a pro lidi zajímající se o tato témata; Vyrobil jsem dvouvrstvý rover, který poskytuje pohodlí v elektronickém hardwaru, je snadno vyrábětelný, odolný a má pěkný vzhled. Teď vám řeknu nějaké budoucnosti o tomto autě. Vytvořil jsem speciální systém, který drží díly motoru pro opravu motorů ve vozidle, které jsem navrhl. Tento systém se přizpůsobuje většině motorů 12V 1000–6000 ot./min. Může také dosáhnout rychlostí 30 km/h a dokonce více, v závislosti na motoru instalovaném z kompatibilních motorů. Myslím, že je vhodnější použít motor 12V 25mm s výkonem 1360 ot./min. S tímto motorem dosáhnete rychlosti kolem 15 km/h. Jako kolo jsem vytvořil návrh vhodný pro Mechanumovo kolo. Díky tomu bude moci zatáčet v libovolném směru bez řídicího mechanismu a pohybovat se v libovolné rovině podle svého přání. Uvnitř je velmi velký prostor. Do tohoto prostoru se vešly 3 různé karty jako Rpi, pixhawk a ardunio uno, stejně jako karta ovladače, jedna nebo více baterií a mnoho dalších věcí. Na přední straně návrhu je kompatibilní prostor pro rpicam a můžete snadno upravit design tak, aby byl kompatibilní s většinou objektivů, které chcete použít. Druhé patro vozidla je snadno připevnitelné a odnímatelné. Mezi prvním a druhým patrem je specifická oblast, která usnadňuje spojení. Střecha vozidla je dostatečně široká, aby pojmula všechny druhy GPS, dokonce i Here3 GPS. Spodní část vozidla je navržena tak, aby usnadnila připojení LED pásků Rgb. Je také vhodný pro kreslení a psaní na všech plochách vozidla. Na tomto vozidle jsem tvrdě pracoval, doufám, že se vám bude líbit.
Návod
1
Krok1: Fáze výstavby roveru

Náhled
- Pokud je na díly něco k nakreslení nebo napsání, je to nakresleno nebo napsáno.
- Části Roveru s podporou hran a spoilerů jsou slepeny do dvou vrstev. Slepte podlahovou a okrajovou část Roveru dohromady.
- Přední část pro upevnění kostry Roveru je umístěna na místě a přilepena. Držák motoru, stabilizátor držáku motoru a části podpěrné tyče (podpůrné části kamery podle zamýšleného použití) jsou umístěny na svá místa.
- Motor je umístěn na místo.
- Po připojení motoru se umístí zbývající elektronika.
- Zbývající díly lze na požádání zapojit a odpojit.
Komentáře